





單位一直想使用無人船幹活,由於我們都沒有獨立操作過,顧慮比較大,擔心我弄不了。我說不用總是不會,萬一有問題,微信在線求助廠家指導唄。雖然早有預見,但是碰到了很多出乎意料的問題,多次處於崩潰的邊緣。智能無人船不是許多人想象地那樣的玩具船,是一個集電氣、機械、人工智能、高端裝備於一身的綜合體,我認爲,青島作爲海洋強市,應該依託青島造船和裝備優勢,將無人船作爲高科技行業來帶動人工智能和海洋裝備的發展。
1、吊車裝船,
裝上船以後,從船頂至地面有5m高,可能有些地方不能通過,需要繞行。

到達施工地,發現村中的空中電纜非常多,且高度很多小於5m,因此貨車無法通過,只能想辦法將無人船通過平板車穿村運到碼頭,這樣吊車也能穿村到達碼頭

到達碼頭以後,將船從平板車上吊到碼頭上以後,開始調試和安裝
2、安裝和調試
首先將汽油發電機拉起來,給無人船充電。將 船右弦的外接電纜連接,船右弦的旋轉按鈕,“關”換至“岸電”,開始給UPS充電,UPS是船舶所有電子設備的電源包括多波束和與岸基通訊。給2個遙控器充電:操作遙控器和佈防遙控器(主要用來脫鉤和抱鉤,不用的時候,必須關閉,防止誤碰)。
l在岸上(無冷卻水)啓動發動機最多不超過30秒。
l 發動機啓動前注意需將油門旋鈕旋至0。
l 在岸上(無冷卻水)禁止啓動發電機。
l UPS的遙控控制必須在UPS充電狀態下才有效,即發電機充電或岸電充電狀態。
l 在岸上(無冷卻水)禁止啓動空調。
l 油門旋鈕的操作一定要緩慢微調,切不可迅速旋轉至很大值,否則會損傷機器並且非常危險。
l 油門刻度前2格轉速上升不明顯,第3格之後纔會感受到發動機聲音變大、動力提升。
l 啓動/停止發動機、模式切換等操作時,安全起見最好將油門旋至0再進行其他操作。
然後,打開船左舷的底層電池開關,將遙控器與船體建立無線聯繫。將遙控器設置爲遙控模式,上層模式爲自主模式。檢查UPS的電量,UPS電量90%,放了四個月,還有這麼多電量。

隨後,動一下方向舵,看是否可以左右控制。電源開關撥到發電機檔位;然後再下放無人艇到水裏;下水後用遙控器打開發電機,看能不能打開;然後打開發動機,檢查前進和後退功能是否正常,判定正常以後才能將船放開,開出去幹活。
l 使用航行遙控器將艇緩慢停靠於母船船舷邊,使用專用鉤具將艇上的回收繩鉤上母船。
l 關閉艇上設備,包括髮動機、發電機、空調、測量設備(這些設備的運行需要冷卻水冷卻,否則會燒壞)
l 使用回收繩將艇的船頭船尾固定住,並將錘頭落入至槽中。
l 等待錘頭完全垂落,吊帶很柔軟時,使用布放遙控器對接錘頭(此過程需要約10秒)。
l 緩慢啓動吊機確保抱持機構完全抱緊後,再吊起艇至母船。
l 接好岸電充電線,將充電開關撥至“岸電”,技術人員進入設備艙中讀取數據等工作。
l 數據讀取結束後請記得關閉UPS,並蓋好艙蓋。
3、補充:
l 若海況較差船停靠母船晃動較大,爲讓錘頭能準確落入鐵槽中,需要將引導繩也鉤至母船甲板,然後將錘頭通過引導繩引導滑落至鐵槽中。
l 艇吊上母船後請檢查:艇體有無擦碰、割破,艇底部和測量設備有無破損; 可以通過噴泵底部格柵觀察噴泵內部葉片有無垃圾、漁網纏繞,若有需要及時清理;
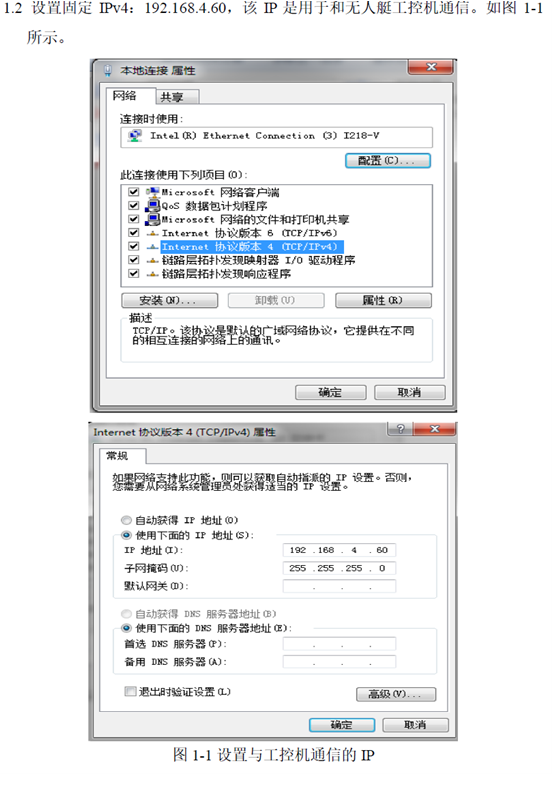
控制電腦的設置:一般已經設置好,第一次設置時,需要將
1) MBR的天線連接到主機
2) 將電腦的網線和MBR的網線用HUB連接起來,MBR已經組建了無線服務器,需要將第三方設備逐一增加才能實現各設備之間的通訊
其中電腦的增加方法如下
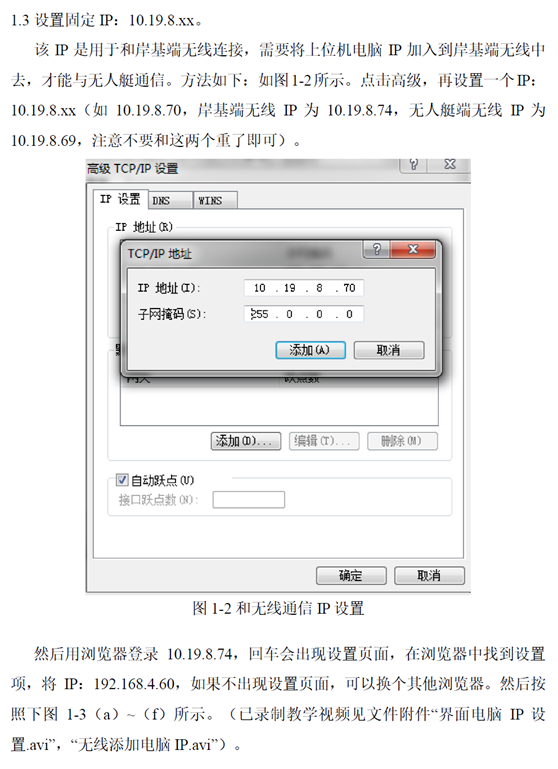
然後增加電腦至MBR的無線網絡中
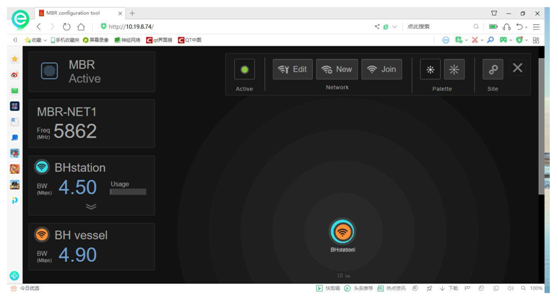
今天增加了以後,監控可以啓動,但是導航界面的左上角2個按鈕:航控和遙感是紅色,求助了程和胡,檢查了config文件,沒有問題,重啓了UPS,正常了
那麼,如果要監控多波束和聲納,電腦也必須連接至HUB中,且加入到MBR的無線通訊服務中.
聲納主機保持開機狀態,但是加電必須通過無人船的顯示控制界面來控制,用萬用電表測了,確實沒有電。
天黑了,就沒有給聲納主機家電,只能明天在嘗試。更多信息關注xiaok海洋測繪網
無人艇作業結束,關掉一切必須關掉的設備:比如空調,多波束換能器。