




正文
所謂數據存儲結構,就是數據的元素與元素之間在計算機中的一種表示,它的目的是爲了解決空間規模問題,或者是通過空間規模問題從而間接地解決時間規模問題。我們知道,隨着輸入的數據量越來越大,在有限的內存裏,不能把這些數據完全的存下來,這就對數據存儲結構和設計存儲的算法提出了更高的要求。
本文將介紹幾種存儲結構,分別爲鏈式結構、樹形結構、圖結構以及矩陣結構。
第一節 鏈式存儲結構
所謂鏈式存儲結構,一般就是用一個頭指針指向鏈表的第一個節點,如果你要增加新的存儲元素時,只需在已有節點的後面插入新結點即可。
鏈表通常有單鏈表、雙鏈表、循環鏈表。在這,我只介紹單鏈表,雙鏈表和循環鏈表只是單鏈表的拓展罷了。下圖就是一個簡單的單鏈表圖示。

typedef char DataType; /***假設結點的數據域類型爲字符***/ typedef struct node{ /***結點類型定義***/ DataType data; /***結點的數據域***/ struct node *next; /***結點的指針域***/ }ListNode; typedef ListNode *LinkList; ListNode *p; LinkList head; 附註: ① LinkList和ListNode *是不同名字的同一個指針類型(命名的不同是爲了概念上更明確) ② LinkList類型的指針變量head表示它是單鏈表的頭指針 ③ ListNode *類型的指針變量p表示它是指向某一節點的指針下面我們來看單鏈表的操作:創建節點、增加節點、刪除節點、查詢、修改。
1.創建節點:聲明一個節點併爲其申請一段內存空間,此節點有數據域和指針域。
node = (struct List *)malloc(sizeof(struct List));
2.增加節點:插入節點,分爲頭插入、尾插入和非頭尾插入。
①. 在表頭插入節點,如圖
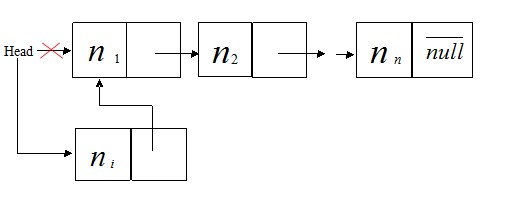
if(p == head) /***其中p爲鏈表中的某一節點***/ { struct list *s = NULL; s = (struct list *)malloc(sizeof(struct list)); /***申請空間***/ s->DataNumber = data; /***爲節點s的數據域賦值***/ /***將節點s插入表頭***/ s->next = p; head = s; }②. 在表尾插入節點,如圖
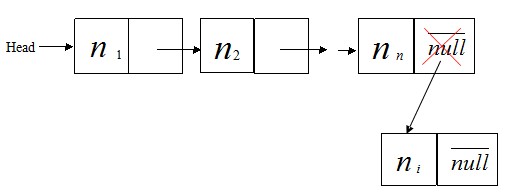
if(p->next == NULL) /***其中p爲鏈表中的某一節點***/ { struct list *s = NULL; s = (struct list *)malloc(sizeof(struct list)); /***申請空間***/ s->DataNumber = data; /***爲節點s的數據域賦值***/ /***將節點s插入表尾***/ p->next = s; s->next = NULL; }③. 在表中插入非頭尾節點,如圖
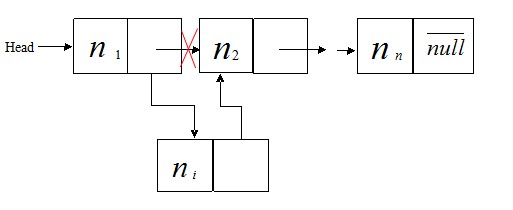
struct list *s = NULL; s = (struct list *)malloc(sizeof(struct list)); /***申請空間***/ s->DataNumber = data; /***爲節點s的數據域賦值***/ /***將節點s插入表中***/ s->next = p; /***其中p爲鏈表中的某一節點***/ q->next = s; /***其中q爲鏈表中p節點的前一個節點***/
3.刪除節點:分爲刪除頭結點,刪除尾節點,刪除頭尾節點。
①. 刪除表頭結點,如圖
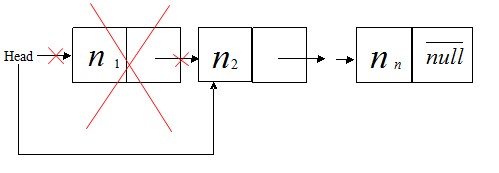
if(p == head) /***p指向鏈表中的某一節點***/ { head = p->next; }②. 刪除表尾節點,如圖
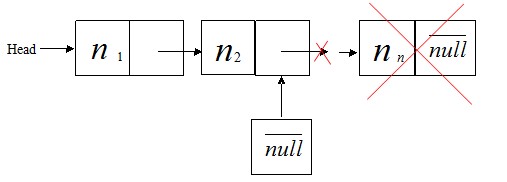
附註說明:上圖中刪完尾節點之後,新鏈表的尾節點下標應爲n-1。不過由於作圖時只做了尾節點,故用圖中的n2節點代替。
刪除尾節點的代碼如下:
if(p->next == NULL) /***p指向鏈表中的某一節點***/ { q->next = NULL; /***q指向鏈表中的p節點的前一節點**/ }③. 刪除非頭尾節點,如圖

刪除非頭尾節點的代碼如下:
q->next = p->next; /***p指向鏈表中的某一節點,q指向鏈表中的p節點的前一節點***/
4.查詢節點:在鏈表中找到你想要找的那個節點。此操作是根據數據域的內容來完成的。查詢只能從表頭開始,當要找的節點的數據域內容與當前不相符時,只需讓當前節點指向下一結點即可,如此這樣,直到找到那個節點。
附註:此操作就不在這用圖和代碼說明了。
5.修改節點:修改某個節點數據域的內容。首先查詢到這個節點,然後對這個節點數據域的內容進行修改。
附註:同上
ok,鏈表的幾種操作介紹完了,接下來我們來總結一下鏈表的幾個特點。
鏈式存儲結構的特點:
1.易插入,易刪除。不用移動節點,只需改變節點中指針的指向。
2.查詢速度慢:每進行一次查詢,都要從表頭開始,速度慢,效率低。
擴展閱讀
鏈表:http://public.whut.edu.cn/comptsci/web/data/512.htm
第二節 樹形存儲結構
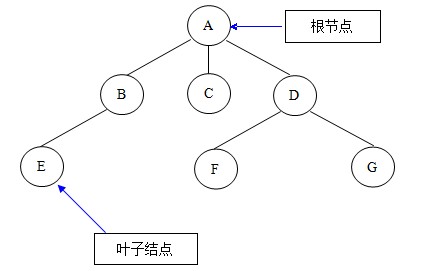
所謂樹形存儲結構,就是數據元素與元素之間存在着一對多關係的數據結構。在樹形存儲結構中,樹的根節點沒有前驅結點,其餘的每個節點有且只有一個前驅結點,除葉子結點沒有後續節點外,其他節點的後續節點可以有一個或者多個。
如下圖就是一棵簡單的樹形結構:
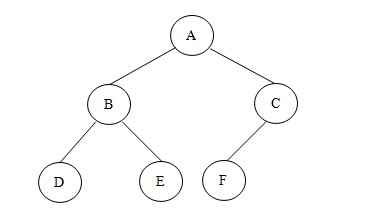
說到樹形結構,我們最先想到的就是二叉樹。我們常常利用二叉樹這種結構來解決一些算法方面的問題,比如堆排序、二分檢索等。所以在樹形結構這節我只重點詳解二叉樹結構。那麼二叉樹到底是怎樣的呢?如下圖就是一顆簡單的二叉樹:
附註:有關樹的概念以及一些性質在此不做解釋,有意者請到百科一覽。
二叉樹的類型描述如下:
typedef struct tree { char data; struct tree * lchild, * rchild; /***左右孩子指針***/ }tree;二叉樹的操作:創建節二叉樹,創建節點,遍歷二叉樹,求二叉樹的深度。
1.創建二叉樹:聲明一棵樹併爲其申請存儲空間。
struct tree * T = NULL; T = (struct tree *)malloc(sizeof(struct tree));
2.創建節點:除根節點之外,二叉樹的節點有左右節點之分。

創建節點的代碼如下:
struct tree * createTree() { char NodeData; scanf(" %c", &NodeData); if(NodeData == '#') return NULL; else { struct tree * T = NULL; T = (struct tree *)malloc(sizeof(struct tree)); T->data = NodeData; T->lchild = createTree(); T->rchild = createTree(); return T; } }3.遍歷二叉樹:分爲先序遍歷、中序遍歷、後續遍歷。
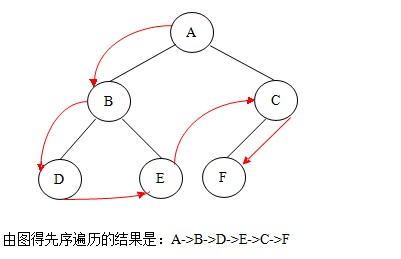
①.先序遍歷:若二叉樹非空,則依次執行如下操作:
(1) 訪問根結點;
(2) 遍歷左子樹;
(3) 遍歷右子樹。
如圖:
先序遍歷的代碼如下:
void PreTravser(struct tree * T) { if(T == NULL) return; else { printf("%c",T->data); PreTravser(T->lchild); PreTravser(T->rchild); } }②.中序遍歷:若二叉樹非空,則依次執行如下操作:
(1)遍歷左子樹;
(2)訪問根結點;
(3)遍歷右子樹。
如圖:
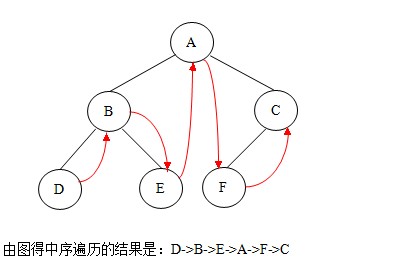
中序遍歷的代碼如下:
void MidTravser(struct tree * T) { if(!T) { return; } else { MidTravser(T->lchild); printf("%c",T->data); MidTravser(T->rchild); } }③.後續遍歷:若二叉樹非空,則依次執行如下操作:
(1)遍歷左子樹;
(2)遍歷右子樹;
(3)訪問根結點。
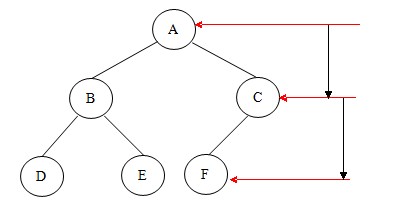
如圖:

void PostTravser(struct tree * T) { if(!T) return; else { PostTravser(T->lchild); PostTravser(T->rchild); printf("%c->",T->data); } }4.求二叉樹的深度:樹中所有結點層次的最大值,也稱高度。
二叉樹的深度表示如下圖:
int treeDeepth(struct tree * T) { int i, j; if(!T) return 0; else { if(T->lchild) i = treeDeepth(T->lchild); else i = 0; if(T->rchild) j = treeDeepth(T->rchild); else j = 0; } return i > j? i+1:j+1; }好了,二叉樹的幾種操作介紹完了。
拓展閱讀
二叉樹:http://student.zjzk.cn/course_ware/data_structure/web/DOWNLOAD/%CA%FD%BE%DD%BD%E1%B9%B9%D3%EB%CB%E3%B7%A82.htm
赫夫曼編碼:http://blog.csdn.net/fengchaokobe/article/details/6969217
第三節 圖型存儲結構
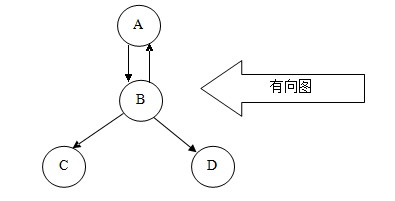
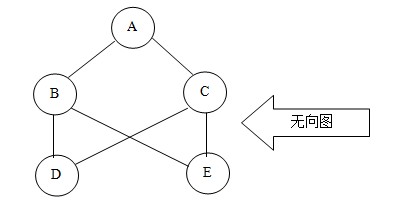
所謂圖形結構,就是數據元素與元素之間的關係是任意的,任意兩個元素之間均可相關,即每個節點可能有多個前驅結點和多個後繼結點,因此圖形結構的存儲一般是採用鏈接的方式。圖分爲有向圖和無向圖兩種結構,如下圖
1.圖的結構有好幾種,在實際應用中需根據具體的情況選擇合適的結點結構和表結構。常用的有數組結構、鄰接表。
①.數組結構
數組結構的類型描述如下:
typedef char VertexType; /***頂點類型***/ typedef int EdgeType; /***邊權值類型***/ #define maxvex 100 /***頂點的最大個數***/ typedef struct { VertexType vexs[maxvex]; /***頂點個數***/ EdgeType arc[maxvex][maxvex]; /***兩頂點構成邊的權值***/ }Mgraph;附註:當前圖爲無向圖時,圖中某兩個頂點VA和VB構成一條邊時,其權值可表示爲EdgeType arc[VA][VB];當前圖爲有向圖時,圖中某兩個頂點VA和VB構成一條邊時,並且是由VA指向VB,其權值可表示爲EdgeType arc[VA][VB],如果是由VB指向VA,其權值可表示爲EdgeType arc[VB][VA]。②.鄰接表
鄰接表的類型描述如下:
typedef char VertexType; // 頂點類型 typedef int EdgeType; //邊權值類型 typedef struct EdgeNode //邊表節點 { int adjvex; //鄰接點域,存儲該頂點對應的下標 EdgeType weight; //用於存儲權值 struct EdgeNode *next; //鏈域,指向下一個鄰接點 }EdgeNode; typedef struct VertexNode //頂點表節點 { VertexType data; //頂點域,存儲頂點信息 EdgeNode * firstedge; //邊表頭指針 }VertexNode,AdjList[MAXVEX]; typedef struct { AdjList adjList; int numVertexes,numEdges; //圖當前頂點數和邊數 }GraphAdjList;2.圖的遍歷:從圖中的某一節點出發訪問圖中的其餘節點,且使每一節點僅被訪問一次。圖的遍歷算法是求解圖的連通性問題、拓撲排序和求路徑等算法的基礎。圖的遍歷分爲深度優先遍歷和廣度優先遍歷,且它們對無向圖和有向圖均適用。
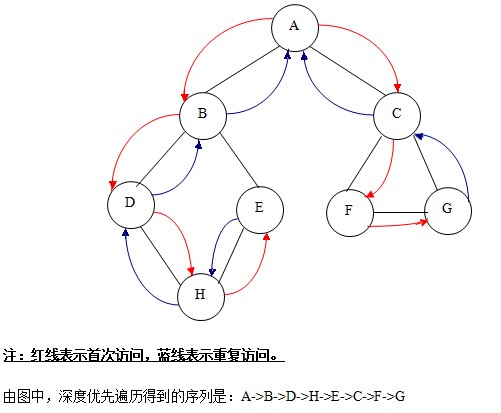
①. 深度優先遍歷
定義說明:假設給定圖G的初態是所有頂點均未曾訪問過。在G中任選一頂點V爲初始出發點,則深度優先遍歷可定義如下:首先訪問出發點V,並將其標記爲已訪問過;然後依次從V出發搜索v的每個鄰接點W。若W未曾訪問過,則以W爲新的出發點繼續進行深度優先遍歷,直至圖中所有和源點V有路徑相通的頂點(亦稱爲從源點可達的頂點)均已被訪問爲止。若此時圖中仍有未訪問的頂點,則另選一個尚未訪問的頂點作爲新的源點重複上述過程,直至圖中所有頂點均已被訪問爲止。
深度遍歷過程如下圖:
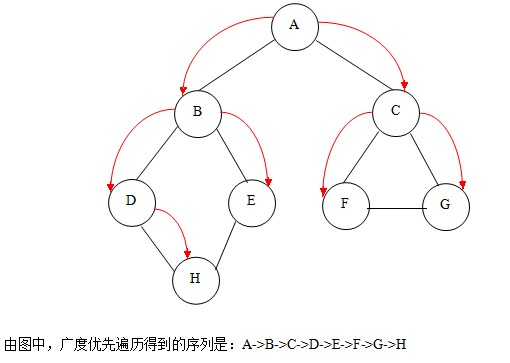
②. 廣度優先遍歷
定義說明:假設從圖中某頂點V出發,在訪問了V之後一次訪問V的各個未曾訪問過的鄰接點,然後分別從這些鄰接點出發依次訪問它們的鄰接點,並使“先被訪問的頂點的鄰接點”先於“後被訪問的頂點的鄰接點”被訪問,直至圖中所有已被訪問的頂點的鄰接點都被訪問到。若此時圖中還有頂點未被訪問,則另選圖中一個未曾被訪問的頂點作爲起始點,重複上述過程,直至圖中所有頂點都被訪問到爲止。換句話說,廣度優先遍歷圖的過程是以V爲起點,由近至遠,依次訪問和V有路徑相同且路徑長度爲1,2,...的頂點。
廣度遍歷過程如下圖:
擴展閱讀
最小生成樹:Prim算法,Kruskal算法
最短路徑:Dijkstra算法,Floyd算法
第四節 結束語
想想,寫寫,畫畫......