




其實我們藝賽旗的 RPA 體系,在語言框架方面,是完整使用 python 的,因此在共享機器人這一場景下,大家很容易就能想象怎麼使用,使用機制就是 package 的安裝和 import
01
—
發佈機器人
首先,你可以嘗試發佈機器人爲庫文件
在工具菜單中,可以看到機器人上傳、機器人同步、機器人瀏覽
機器人上傳:你可以把當前工程作爲庫發佈到服務器
機器人上傳:你也可以把當前工程作爲庫發佈到本地(機器人和設計安裝在統一目錄)
你可以瀏覽安裝的機器人庫,庫文件安裝在C:\iS-RPA\plugin\Com.Isearch.Func.Python\Lib\ubpalib下,文件名就是共享的機器人名稱
機器人會自動同步服務器的機器人庫,但是設計器不會,因此設計器可能需要你手動選擇機器人同步菜單來同步服務器的機器人庫文件
通過上面的簡單操作,當前工程的機器人發佈就完成了
02
—
機器人定義
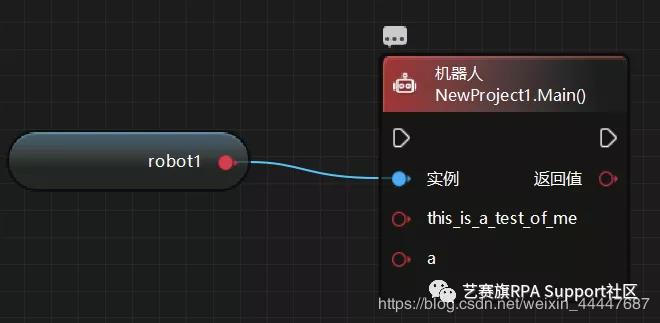
機器人是一個面向對象的實現
大家首先定義一個變量
然後大家可以選擇實例化的類(指定這個機器人是哪種機器人)
03
—
機器人工作
在菜單中,可以看到機器人類的流程和全局變量,你可以隨意引用他們

你可以指揮你的機器人,執行預定好的流程,當然也可以臨時傳遞和改變各種全局變量和參數
順便說一下,原來使用 import 方法的時候,globalFun 會衝突的問題、日誌會多重打印的問題,我們也一併解決了,大家放心的使用吧